Publications
Citations
Journal papers
Guaranteed Reachability on Riemannian Manifolds for Unknown Nonlinear Systems
Taha Shafa, Melkior Ornik
Submitted to and currently under review by IEEE Transactions on Automatic Control, 2024
Taha Shafa, Melkior Ornik
Submitted to and currently under review by IEEE Transactions on Automatic Control, 2024
Determining the reachable set for a given nonlinear system is critically important for autonomous trajectory planning for reach-avoid applications and safety critical scenarios.
Providing the reachable set is generally impossible when the dynamics are unknown, so we calculate underapproximations of such sets using local dynamics at a single point and bounds
on the rate of change of the dynamics determined from known physical laws. Motivated by scenarios where an adverse event causes an abrupt change in the dynamics, we attempt to
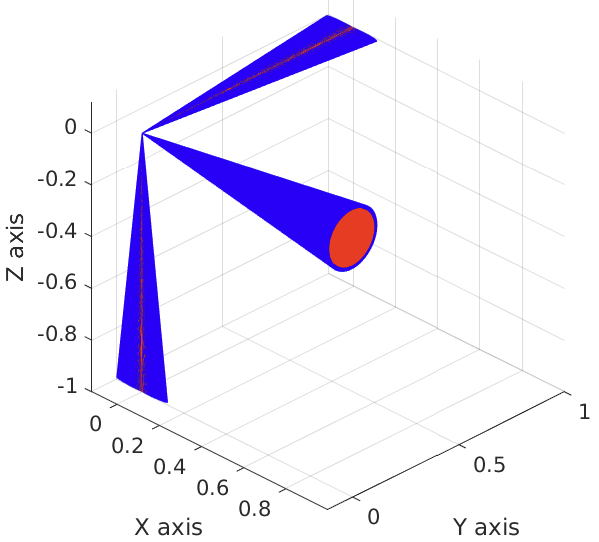
determine a provably reachable set of states without knowledge of the dynamics. This paper considers systems which are known to operate on a manifold. Underapproximations are
calculated by utilizing the aforementioned knowledge to derive a guaranteed set of velocities on the tangent bundle of a complete Riemannian manifold that can be reached within a
finite time horizon. We then interpret said set as a control system; the trajectories of this control system provide us with a guaranteed set of reachable states the unknown system
can reach within a given time. The results are general enough to apply on systems that operate on any complete Riemannian manifold. To illustrate the practical implementation of our
results, we apply our algorithm to a model of a pendulum operating on a sphere and a three-dimensional rotational system which lives on the abstract set of special orthogonal matrices.
@misc{shafa2024guaranteedreachabilityriemannianmanifolds,
title={Guaranteed Reachability on Riemannian Manifolds for Unknown Nonlinear Systems},
author={Taha Shafa and Melkior Ornik},
year={2024},
eprint={2404.09850},
archivePrefix={arXiv},
primaryClass={eess.SY},
url={https://arxiv.org/abs/2404.09850},
}
Online Learning and Control Synthesis for Reachable Paths of Unknown Nonlinear Systems
Yiming Meng, Taha Shafa, Jesse Wei, Melkior Ornik
Submitted to and currently under review by IEEE Transactions on Automatic Control, 2024
Yiming Meng, Taha Shafa, Jesse Wei, Melkior Ornik
Submitted to and currently under review by IEEE Transactions on Automatic Control, 2024
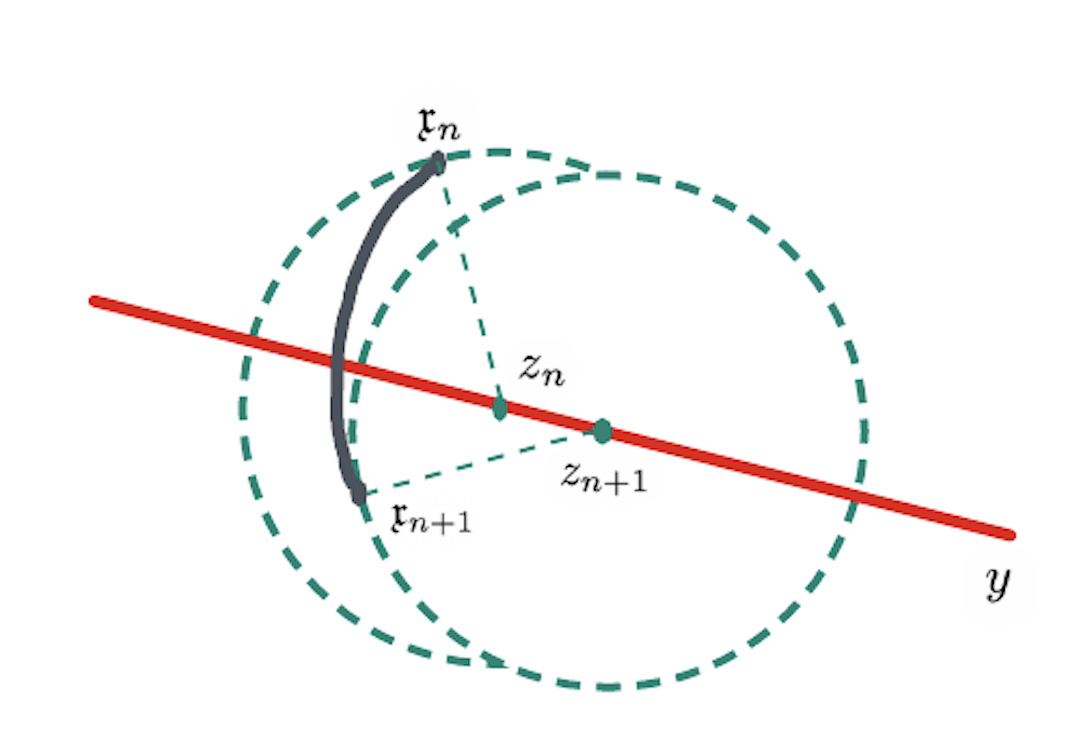
In this paper, we present a novel method to drive a nonlinear system to a desired state, with limited a priori knowledge of its dynamic model: local dynamics at a single point and
the bounds on the rate of change of these dynamics. This method synthesizes control actions by utilizing locally learned dynamics along a trajectory, based on data available up to
that moment, and known proxy dynamics, which can generate an underapproximation of the unknown system's true reachable set. An important benefit to the contributions of this paper
is the lack of knowledge needed to execute the presented control method. We establish sufficient conditions to ensure that a controlled trajectory reaches a small neighborhood of
any provably reachable state within a short time horizon, with precision dependent on the tunable parameters of these conditions.
@misc{meng2024onlinelearningcontrolsynthesis,
title={Online Learning and Control Synthesis for Reachable Paths of Unknown Nonlinear Systems},
author={Yiming Meng and Taha Shafa and Jesse Wei and Melkior Ornik},
year={2024},
eprint={2403.03413},
archivePrefix={arXiv},
primaryClass={math.OC},
url={https://arxiv.org/abs/2403.03413},
}
Reachability of Nonlinear Systems with Unknown Dynamics
Taha Shafa, Melkior Ornik
IEEE Transactions on Automatic Control (TAC), 2022
Taha Shafa, Melkior Ornik
IEEE Transactions on Automatic Control (TAC), 2022
Determining the reachable set for a given nonlinear control system is crucial for system control and planning. However, computing such a set is impossible if the system's dynamics
are not fully known. This paper is motivated by a scenario where a system suffers an adverse event mid-operation, resulting in a substantial change to the system's dynamics,
rendering them largely unknown. Our objective is to conservatively approximate the system's reachable set solely from its local dynamics at a single point and the bounds on the
rate of change of its dynamics. We translate this knowledge about the system dynamics into an ordinary differential inclusion. We then derive a conservative approximation of the
velocities available to the system at every system state. An inclusion using this approximation can be interpreted as a control system; the trajectories of the derived control
system are guaranteed to be trajectories of the unknown system. To illustrate the practical implementation and consequences of our work, we apply our algorithm to a simplified
model of an unmanned aerial vehicle.
@ARTICLE{9764380,
author={Shafa, Taha and Ornik, Melkior},
journal={IEEE Transactions on Automatic Control},
title={Reachability of Nonlinear Systems With Unknown Dynamics},
year={2023},
volume={68},
number={4},
pages={2407-2414},
keywords={Control systems;System dynamics;Trajectory;Vehicle dynamics;Uncertainty;Aerospace electronics;Aerospace control;Aerospace systems;autonomous systems;nonlinear control systems;reachable set computation;uncertain systems},
doi={10.1109/TAC.2022.3170855}}
Peer-reviewed conference papers
Identifying Single-Input Linear System Dynamics from Reachable Sets
Taha Shafa, Roy Dong, Melkior Ornik
IEEE Conference on Decision and Control (CDC), 2023
Taha Shafa, Roy Dong, Melkior Ornik
IEEE Conference on Decision and Control (CDC), 2023
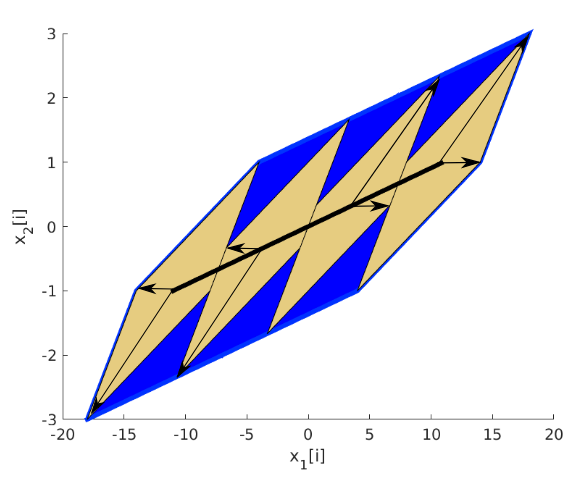
This paper is concerned with identifying linear system dynamics without the knowledge of individual system trajectories, but from the knowledge of the system's reachable sets observed
at different times. Motivated by a scenario where the reachable sets are known from partially transparent manufacturer specifications or observations of the collective behavior of
adversarial agents, we aim to utilize such sets to determine the unknown system's dynamics. The paper has two contributions. Firstly, we show that the sequence of the system's
reachable sets can be used to uniquely determine the system's dynamics for asymmetric input sets under some generic assumptions, regardless of the system's dimensions. We also prove
the same property holds up to a sign change for two-dimensional systems where the input set is symmetric around zero. Secondly, we present an algorithm to determine the system's
dynamics. We apply and verify the developed theory and algorithms on an unknown band-pass filter circuit solely provided the unknown system's reachable sets over a finite observation period.
@INPROCEEDINGS{10384274,
author={Shafa, Taha and Dong, Roy and Ornik, Melkior},
booktitle={2023 62nd IEEE Conference on Decision and Control (CDC)},
title={Identifying Single-Input Linear System Dynamics from Reachable Sets},
year={2023},
volume={},
number={},
pages={3527-3532},
keywords={Linear systems;Band-pass filters;Maximum likelihood detection;System dynamics;Heuristic algorithms;Nonlinear filters;Filtering theory},
doi={10.1109/CDC49753.2023.10384274}}
Maximal Ellipsoid Method for Guaranteed Reachability of Unknown Fully Actuated Systems
Taha Shafa, Melkior Ornik
IEEE Conference on Decision and Control (CDC), 2022
Taha Shafa, Melkior Ornik
IEEE Conference on Decision and Control (CDC), 2022
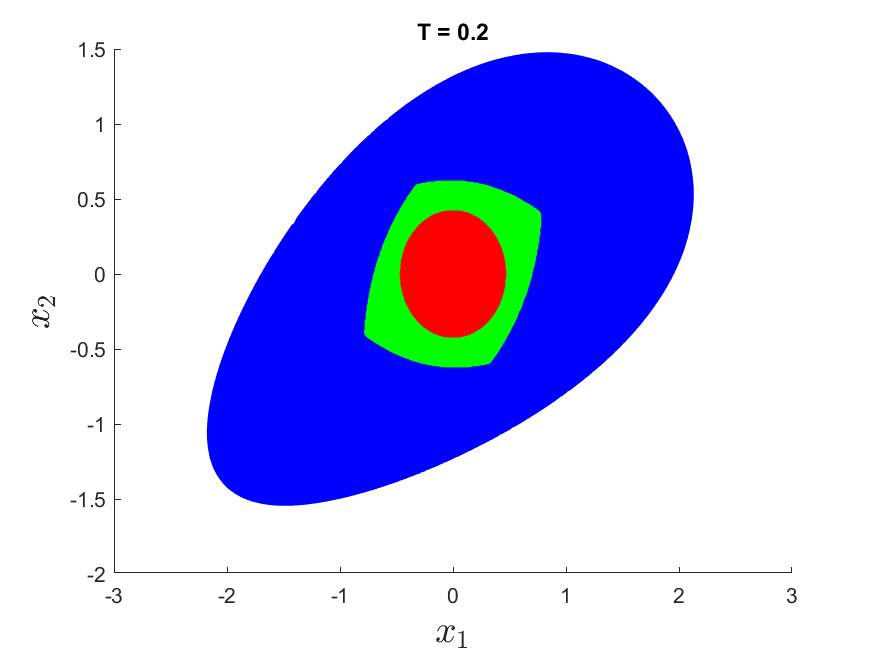
In the face of an adverse event, autonomous systems may undergo abrupt changes in their dynamics. In such an event, systems should be able to determine their continuing capabilities to then
execute a provably completable task. This paper focuses on the scenario of a change in the system dynamics following an adverse event, aiming to determine the system's guaranteed performance
capabilities by finding a set of states that are provably reachable by the system. While it is obviously impossible to exactly determine the reachable set without full knowledge of the
system dynamics, we present a method of determining its under-approximation while assuming only partial knowledge of the system structure. Our technical approach relies on showing that
an intersection of infinitely many ellipsoids — available velocity sets for each system consistent with the partial knowledge of the dynamics — is the same as an intersection of some
finite collection of ellipsoids. This result enables us to find a maximal ellipsoid lying in such an intersection, yielding a set of velocities that the system is provably able to pursue
regardless of its exact dynamics.
@INPROCEEDINGS{9992407,
author={Shafa, Taha and Ornik, Melkior},
booktitle={2022 IEEE 61st Conference on Decision and Control (CDC)},
title={Maximal Ellipsoid Method for Guaranteed Reachability of Unknown Fully Actuated Systems},
year={2022},
volume={},
number={},
pages={5002-5007},
keywords={Actuators;Uncertainty;System dynamics;Autonomous systems;Perturbation methods;Task analysis;Ellipsoids},
doi={10.1109/CDC51059.2022.9992407}}
High-Frequency Vibration Reduction for Unmanned Ground Vehicles on Unstructured Terrain
Hamza El-Kebir, Taha Shafa, Amartya Purushottam, Melkior Ornik, Ahmet Soylemezoglu
8th International Conference on Modelling and Simulation for Autonomous Systems, 2021
Hamza El-Kebir, Taha Shafa, Amartya Purushottam, Melkior Ornik, Ahmet Soylemezoglu
8th International Conference on Modelling and Simulation for Autonomous Systems, 2021
High-frequency vibrations encountered during land transit of sensitive payloads have long been known to be a possible cause of payload damage and subsequent mission failure. As sensors
are also adversely affected by this phenomenon, we aim to provide a solution to minimize high-frequency noise vibrations without reliance on high performance sensing. Naturally, this
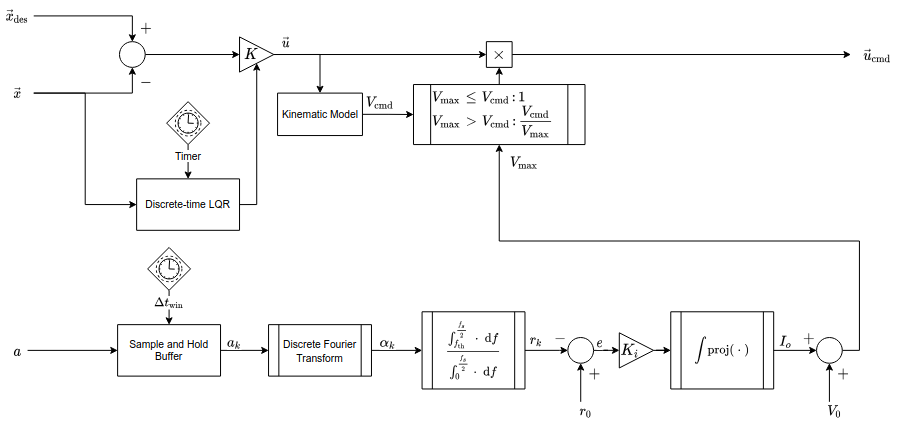
presents the need for on-board adaptive control capabilities to reduce sensor noise and damage to secured payloads. Thus, we present a novel approach to reducing high-frequency vibration
content (HVC) encountered during transit, with the explicit goal of maintaining a desired vehicle speed while keeping high-frequency vibrations below a given threshold regardless of
the terrain characteristics. To this end, we present a two-stage solution consisting of a vibration-compensating speed controller and an optimal tracking controller for control command
determination. The proposed controller is implemented on a Clearpath Jackal unmanned ground vehicle and subjected to a priori unknown mixed terrain types. Experiments performed on these
varying terrains show that the proposed control architecture is able to adjust the desired robot trajectory to remain below the vibration thresholds defined by the mission objective.
@InProceedings{10.1007/978-3-030-98260-7_5,
author="El-Kebir, Hamza
and Shafa, Taha
and Purushottam, Amartya
and Ornik, Melkior
and Soylemezoglu, Ahmet",
title="High-Frequency Vibration Reduction for Unmanned Ground Vehicles on Unstructured Terrain",
booktitle="Modelling and Simulation for Autonomous Systems",
year="2022",
publisher="Springer International Publishing",
address="Cham",
pages="74--92",
isbn="978-3-030-98260-7"
}
Design of a Two DOF Laminate Leg Transmission for Creating Walking Robot Platforms
Benjamin D. Shuch, Taha Shafa, Eric Rogers, Daniel Aukes
20th ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2019
Benjamin D. Shuch, Taha Shafa, Eric Rogers, Daniel Aukes
20th ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2019
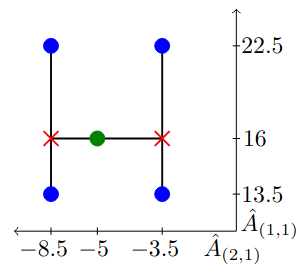
In this article we present a low-cost, two degree-of-freedom laminate robot transmission for legged locomotion applications. This transmission is specifically applied
in the design of a quadrupedal robot, and has the potential to be used in other multi-legged systems. It offers a complex control space with a variety of different
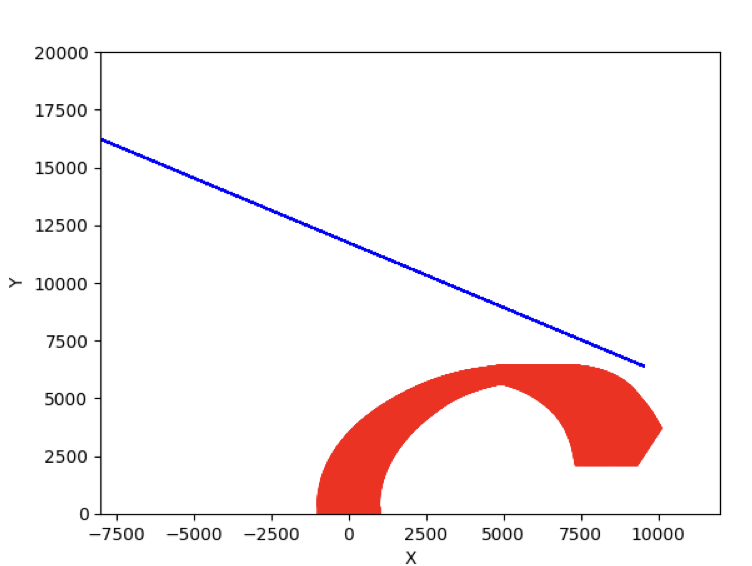
programmable gait trajectories, while leveraging low-cost linkages made using laminate approaches. The two-degree-of-freedom kinematics of the leg are subsequently
modeled in Python, and the workspace of the robot is then experimentally verified on an initial quadrupedal design. Critical design considerations include the laminate
design, the rigidity of the materials that make up the laminate, and the range of motion the device can undergo.
@proceedings{10.1115/DETC2019-98100,
author = {Shuch, Benjamin D. and Shafa, Taha and Rogers, Eric and Aukes, Daniel M.},
title = "{Design of a Two DOF Laminate Leg Transmission for Creating Walking Robot Platforms}",
volume = {Volume 5B: 43rd Mechanisms and Robotics Conference},
series = {International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {V05BT07A046},
year = {2019},
doi = {10.1115/DETC2019-98100},
url = {https://doi.org/10.1115/DETC2019-98100},
eprint = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings-pdf/IDETC-CIE2019/59247/V05BT07A046/6453830/v05bt07a046-detc2019-98100.pdf},
}
Other conference papers
Assured Collision Avoidance for Learned Controllers: A Case Study of ACAS Xu
Gokul Puthumanaillam, Manav Vora, Taha Shafa, Yangge Li, Melkior Ornik, Sayan Mitra
AIAA Scitech, 2024
Gokul Puthumanaillam, Manav Vora, Taha Shafa, Yangge Li, Melkior Ornik, Sayan Mitra
AIAA Scitech, 2024
This paper introduces a novel approach to verification of neural network controlled systems, combining the capabilities of the nnenum framework with the Verse toolkit.
Addressing a critical gap in the traditional verification process which often does not include the system dynamics analysis while computing the neural network outputs,
our integrated methodology enhances the precision and safety of decision-making in complex dynamical systems. By iteratively verifying neural network decisions and
propagating system states, we maintain an accurate representation of the system’s behavior over time, a vital aspect in ensuring operational safety. Our approach is
exemplified through the verification of the neural network controlled Airborne Collision Avoidance System for Unmanned Aircraft (ACAS Xu). We demonstrate that the
integration of nnenum and Verse not only accurately computes reachable sets for the UAS but also effectively handles the inherent complexity and nonlinearity of the system.
The resulting analysis provides a nuanced understanding of the system’s behavior under varying operational conditions and interactions with other agents, such as
intruder aircraft. The comprehensive simulations conducted as part of this study reveal the robustness of our approach, validating its effectiveness in verifying the
safety and reliability of learned controllers. Furthermore, the scalability and adaptability of our methodology suggest its broader applicability in various autonomous
systems requiring rigorous safety verification.
@inbook{doi:10.2514/6.2024-1168,
author = {Gokul Puthumanaillam and Manav Ketan Vora and Taha Shafa and Yangge Li and Melkior Ornik and Sayan Mitra},
title = {Assured Collision Avoidance for Learned Controllers: A Case Study of ACAS Xu},
booktitle = {AIAA SCITECH 2024 Forum},
chapter = {},
pages = {},
doi = {10.2514/6.2024-1168},
URL = {https://arc.aiaa.org/doi/abs/10.2514/6.2024-1168},
eprint = {https://arc.aiaa.org/doi/pdf/10.2514/6.2024-1168}
}
Theses
Reachable Predictive Control: A Novel Control Algorithm for Nonlinear Systems with Unknown Dynamics (Currently being written)
Taha Shafa Advisor: Melkior Ornik
Doctoral thesis. University of Illinois Urbana-Champaign, 2025
Taha Shafa Advisor: Melkior Ornik
Doctoral thesis. University of Illinois Urbana-Champaign, 2025
Cited by 0
Design, Model, and Control of a Low-cost 3 Degree of Freedom Balancing Laminate Leg with an Actively Controlled Ankle Using Fundamental Controls Concepts
Taha Shafa Advisor: Daniel Aukes
Master thesis. Arizona State Univesrity, 2020
Taha Shafa Advisor: Daniel Aukes
Master thesis. Arizona State Univesrity, 2020
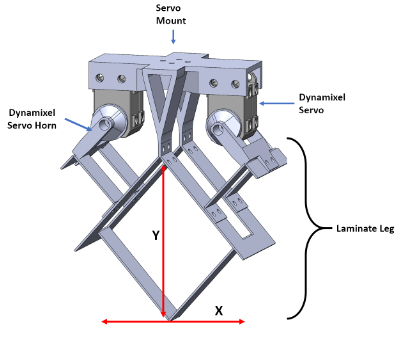
This thesis introduces a new robotic leg design with three degrees of freedom that
can be adapted for both bipedal and quadrupedal locomotive systems, and serves as
a blueprint for designers attempting to create low cost robot legs capable of balancing
and walking. Currently, bipedal leg designs are mostly rigid and have not strongly
taken into account the advantages/disadvantages of using an active ankle, as opposed
to a passive ankle, for balancing. This design uses low-cost compliant materials, but
the materials used are thick enough to mimic rigid properties under low stresses, so
this paper will treat the links as rigid materials. A new leg design has been created
that contains three degrees of freedom that can be adapted to contain either a passive
ankle using springs, or an actively controlled ankle using an additional actuator. This
thesis largely aims to focus on the ankle and foot design of the robot and the torque
and speed requirements of the design for motor selection. The dynamics of the system,
including height, foot width, weight, and resistances will be analyzed to determine
how to improve design performance. Model-based control techniques will be used to
control the angle of the leg for balancing. In doing so, it will also be shown that it
is possible to implement model-based control techniques on robots made of laminate
materials.
@mastersthesis{shafa2020design,
title={Design, Model, and Control of a Low-Cost 3 Degree of Freedom Balancing Laminate Leg with an Actively Controlled Ankle Using Fundamental Controls Concepts},
author={Shafa, Taha},
year={2020},
school={Arizona State University}
}